Performative
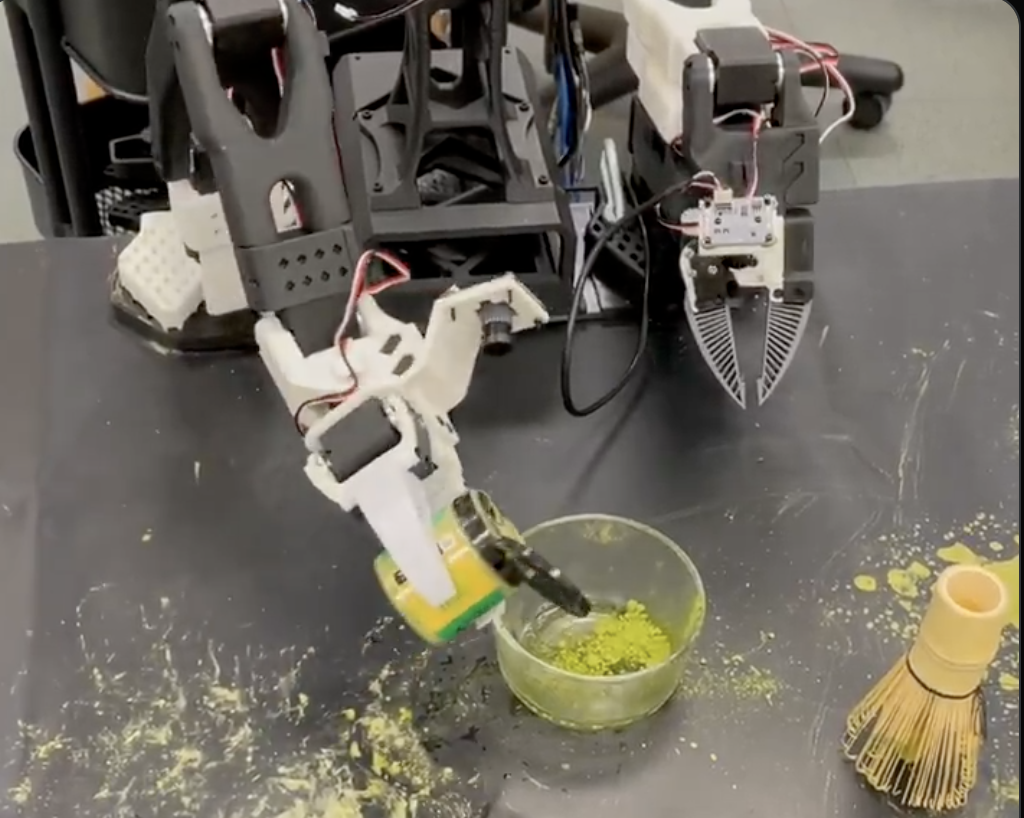
A robot that autonomously makes matcha using finetuned NVIDIA GR00T-N1.5 VLA for bimanual manipulation and Jetson Thor for low latency inference.
Winner @ NVIDIA x HuggingFace x Seeed Embodied AI HackathonA collection of things I've built and worked on.
A robot that autonomously makes matcha using finetuned NVIDIA GR00T-N1.5 VLA for bimanual manipulation and Jetson Thor for low latency inference.
Winner @ NVIDIA x HuggingFace x Seeed Embodied AI Hackathon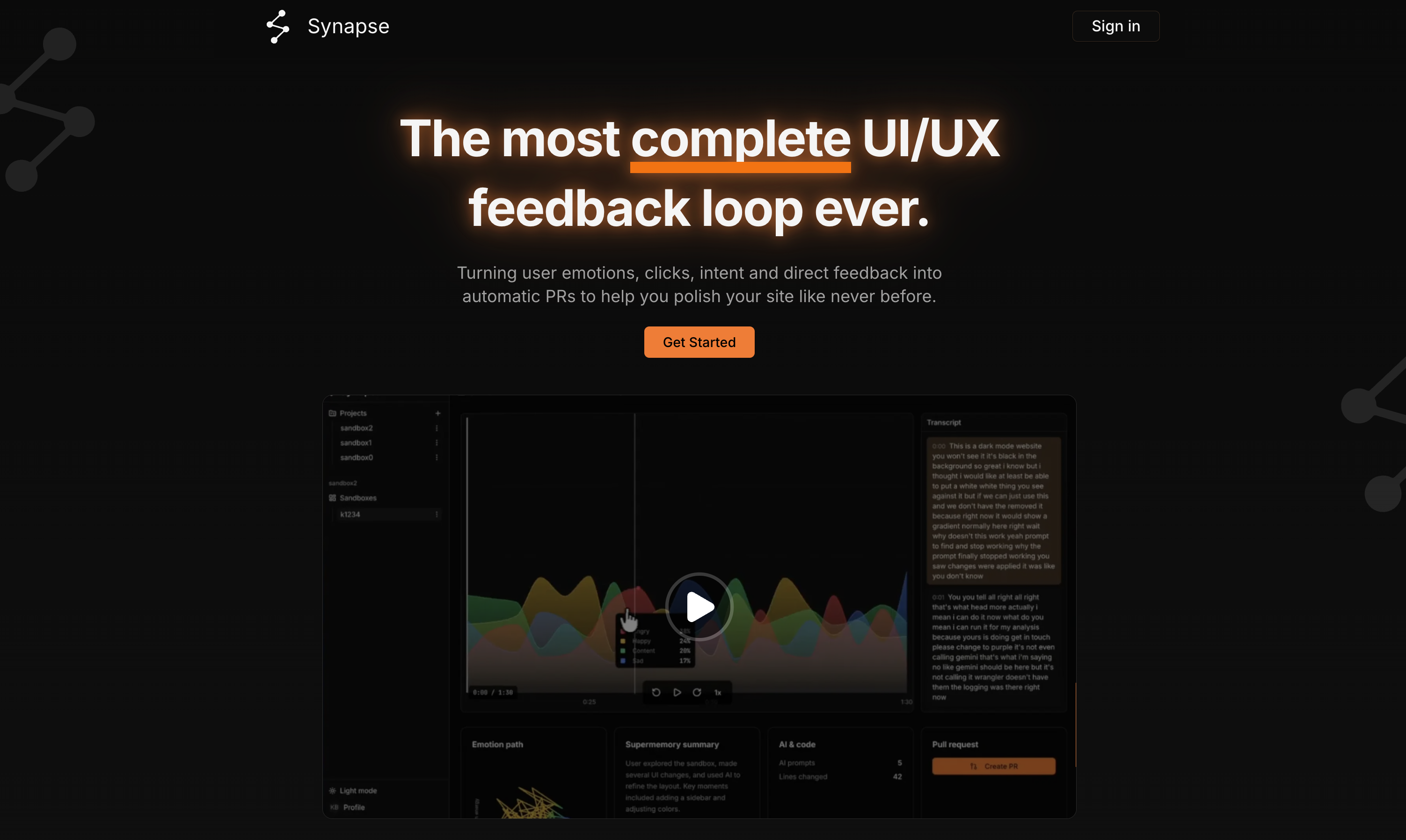
The most complete, scalable UI/UX feedback loop for developers. Turns user emotions, clicks, intent and direct, unfiltered feedback into automatic PRs.
Winner @ HackIllinois 2026 & Best Use of Cloudflare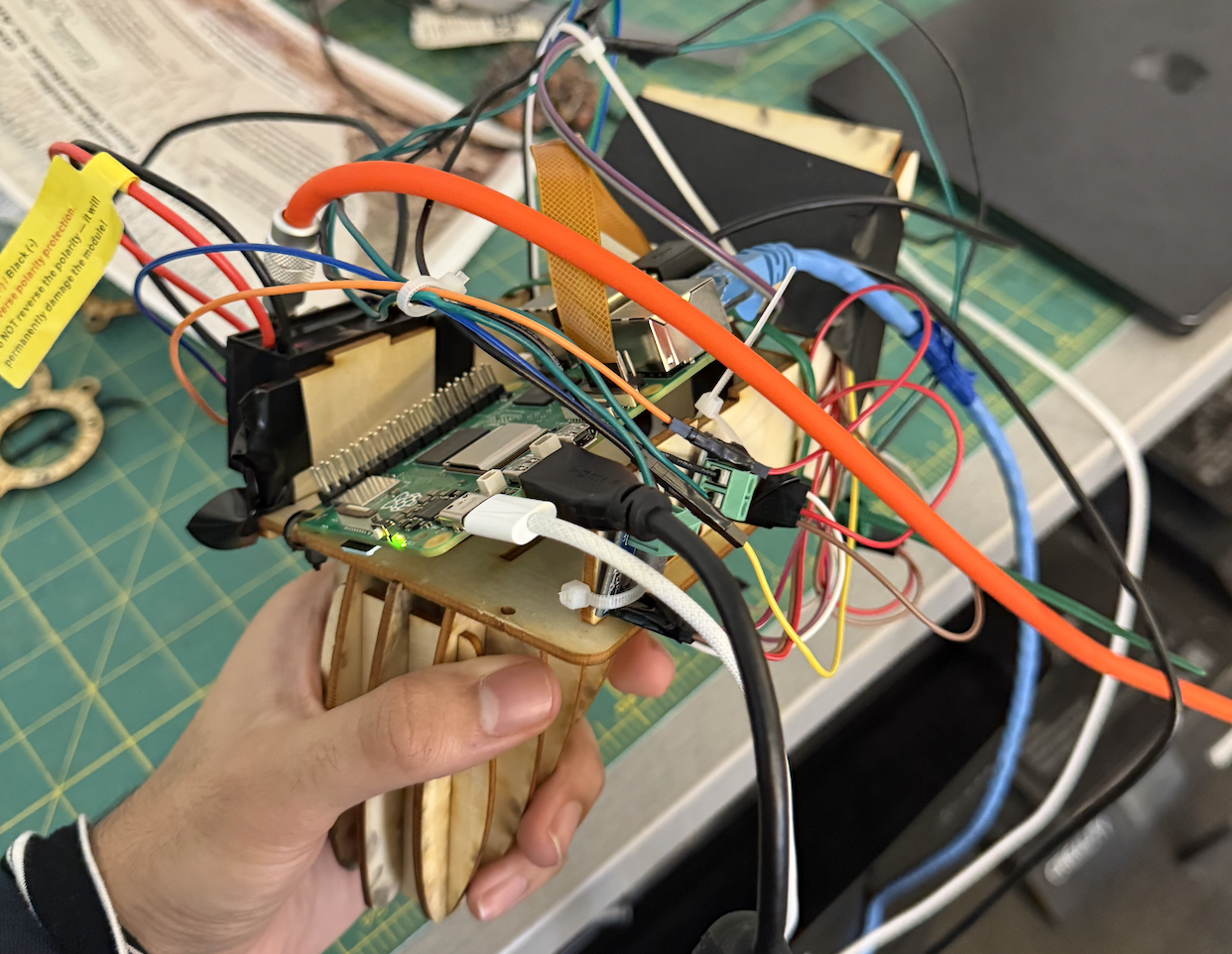
Low-cost, effective handheld scanner-style gun that uses near-IR LEDs and lens filter to isolate and create depth mapping of veins. Built at MakeMIT.
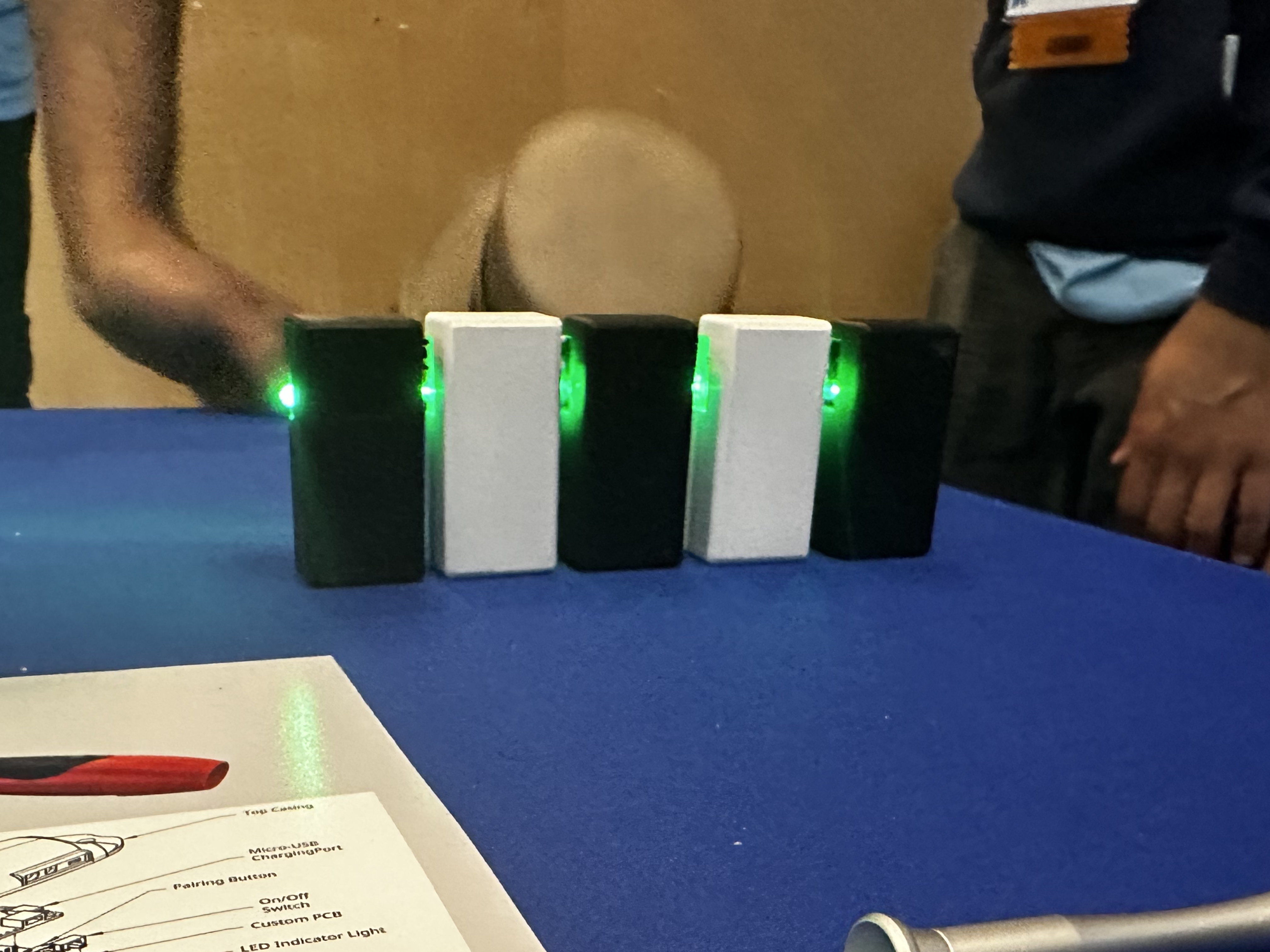
Led software on a patented device for referee communication to deaf athletes during sports games. Worked on this for all of high school, learned a lot about embedded programming, PCB design, and building robust firmware. Presented @ Lemelson-MIT Eurekafest.